
隨著自動化生產(chǎn)線在企業(yè)的普及應用,充分考慮到最大限度地解放勞動力,提高生產(chǎn)效率,改善加工品質(zhì)。計劃將原來由多人手工完成的焙烤薯片分揀裝箱工作,由機器人替代,實現(xiàn)高效、柔性、清潔的自動化作業(yè)。
|
●產(chǎn)品:焙烤薯片 ●形狀:橢圓、心形,表面有波紋。分揀時需識別薯片方位。 ●重量:約1.5g/片。 ●尺寸:直徑大約45mm、厚度大約2~3mm。 ●產(chǎn)線生產(chǎn)效率:350Kg/h(折算為:3889片/min)。 ●來料輸送線寬度:大約 1000mm。 |
線") |
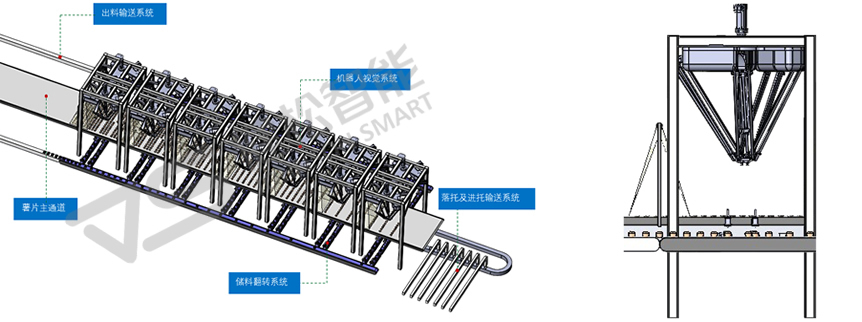
根據(jù)需求方提出的項目技術(shù)要求,結(jié)合現(xiàn)場生產(chǎn)狀況和工藝要求,該方案計劃在薯片出料輸送帶上方位置,依次并排放置14臺Delta機器人( 3+1軸,工作范圍1100mm),采用機器視覺準確定位、識別薯片,并配備儲料翻轉(zhuǎn)系統(tǒng)及出料輸送系統(tǒng),從而實現(xiàn)機器人高效、柔性自動化識別、分揀任務。
系統(tǒng)示意圖
末端執(zhí)行器
考慮到焙烤薯片的形狀、材料以及裝盒堆疊狀況,計劃:
采用先進的多層吸附末端執(zhí)行器,可高效、便捷且方位一致地吸取多片薯片。(吸取薯片的大小、層數(shù),視具體的生產(chǎn)工藝要求及系統(tǒng)調(diào)試情況而定。預計層數(shù):21。)
●設計參數(shù):末端執(zhí)行器自重<0.5kg。
●吸取位置:焙烤薯片上表面的上方。
特點:多次吸取,一次性卸料裝盒。并且,在吸取薯片的同時實現(xiàn)其堆疊。高效、便捷,充分發(fā)揮出機器人自動化工作效能。
定位與檢測
輸送線上薯片的定位與檢測,計劃,采用機器視覺定位,無需人工干預,實現(xiàn)機器人系統(tǒng)自動精準識別需要抓取的工件方位。并且,每臺機器人配備一套視覺,最大程度確保各機器人系統(tǒng)的穩(wěn)定、高速作業(yè)。
●安裝位置:各臺機器人前方的輸送帶上方
特點:采用專利幾何圖案匹配技術(shù),可在困難條件下定位元件,能適應旋轉(zhuǎn)角度、比例和照明條件的變化
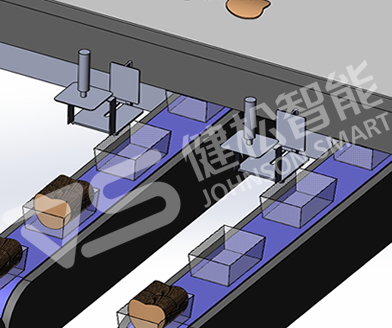 |
落盒與儲料翻轉(zhuǎn)系統(tǒng)
底托落盒:
采用高速氣動落盒機構(gòu),僅由人工負責加載空底托盒,其余過程無需人工干預,自動實現(xiàn)底托的高速落盒及各機器人工位的空盒分配工作。
儲料翻轉(zhuǎn)系統(tǒng):
各機器人工位配備2組儲料翻轉(zhuǎn)系統(tǒng)并交替工作,從而確保機器人高速分揀工作的連續(xù)性。
動作原理及流程簡介:
1)機器人放料完成后,由撥桿推送至翻轉(zhuǎn)器中,同時側(cè)板閉合。
2)翻轉(zhuǎn)器執(zhí)行90°翻轉(zhuǎn),堆疊薯片由垂直變?yōu)樗阶藨B(tài)。
3)側(cè)板打開,同時壓板下推,高速、穩(wěn)定地將薯片推送至下方空托內(nèi)。
實現(xiàn)“機器視覺+工業(yè)機器人”一體化全自動精準可靠定位抓放,無需人工干預或設定程式具有強大的柔性、可拓展性,能快速響應工廠后續(xù)產(chǎn)品、工藝的更新。多次吸取,一次性卸料裝盒。并且,在吸取薯片的同時實現(xiàn)其堆疊。14臺機器人聯(lián)動穩(wěn)定工作,能夠保證整體的生產(chǎn)效能:350Kg/h。
Delta機器人應用
主要參數(shù)指標:
Delta類型,3+1自由度,有效負載(最大)1kg,額定工作范圍Φ1100mm*250mm。預計穩(wěn)定分揀薯片速度350片/min。(21片抓。以實際工況為準)
機器人活動范圍安全保護設置,具有實時監(jiān)控、安全防錯報警等功能
特點:
delta機器人廣泛應用于高速抓放和碼垛包裝加工。有受力平衡、結(jié)構(gòu)簡潔、動作快速、靜音、低能耗和低維護等特點。
視頻欣賞:
